本文介绍了如何使用STM32微控制器,结合STM32CubeMX配置工具和SPI通讯接口,来驱动和控制WS2812 LED灯带。这是一个集硬件连接、软件配置和编程开发于一体的综合性项目,目标是实现对LED灯带颜色和亮度的精确控制。
”do dow IN ow s1 w win wind windows10 ws 关闭 方法“ 的搜索结果

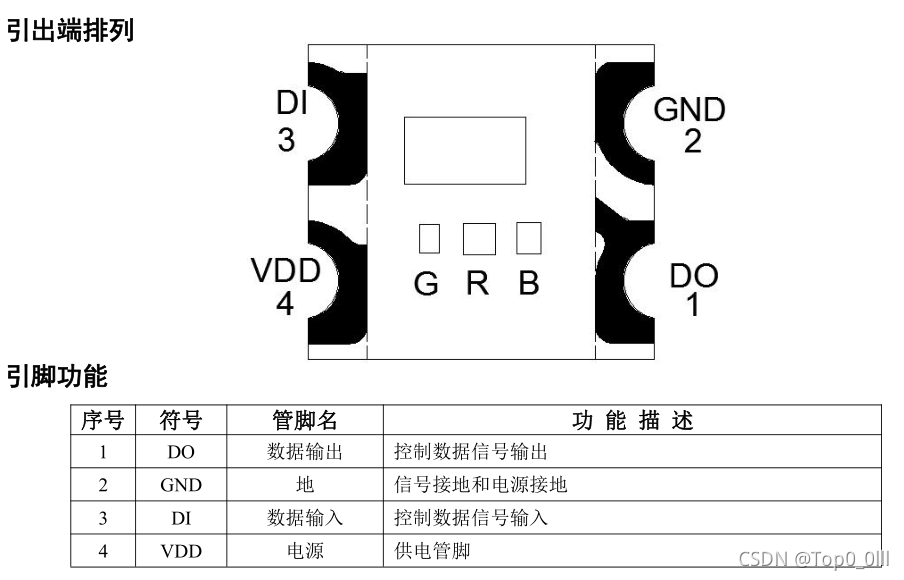
买了一个圆形的WS2812模块玩玩,特来总结一下驱动方法,感觉对比于普通的RGB灯来说,还是有点不一样的。踩了一些坑,也在此列出。
WS2812B全彩LED灯,采用PWM+DMA方式控制,已经编写好红色呼吸灯、绿色呼吸灯、蓝色呼吸灯和随机呼吸灯程序,还有最基本的RGB三种颜色的0~255亮度调节函数。
代码主要是基于stm32开发,包括两路ws2812b初始化代码,以及呼吸灯、跑马灯、彩虹灯等灯效程序,均是用pwm+dma的方式发送数据,不占用内存,本程序已用在项目中,可稳定运行。
3. 不正确的WebSocket地址:请确保你正在使用正确的WebSocket地址,包括正确的协议(通常是 'ws://' 或 'wss://'),主机名(IP地址或域名)和端口号。2. 网络问题:这种错误也可能由于网络问题导致,比如防火墙阻止...

1、 爬坑学习新旅程,虚拟机搭建esp32开发环境,打印 “Hellow World”。 2、 巧用eclipes编辑器,官方教程在在Windows下搭建esp32开发环境,打印 “Hellow World”。 3、 认识基本esp32的GPIO接口,开...
使用51单片机控制17个2812灯,这里选择STC8芯片,最大频率可以达到35M,参考网上的各种文章案例,使用定时器做的时候实测做不到规格书要求的245-345ns,STC8G1K08不带PWM,所以只能使用nop来做,好在单片机在这里...
ws supports the permessage-deflate extension which enables the client and server to negotiate a compression algorithm and its parameters, and then selectively apply it to the da...
华为WS550固件升级方法本文主要介绍了华为WS550无线路由器,固件升级的操作方法,同时还供了华为WS550路由器的最新固件下砸。路由器进行固件升级的作用有2个方面:1、修复已知的故障、BUG;2、对新功能的支持。下面...
vue报错解决
Remove JAX-WS (Java API for XML Web Services) 那么我们如果有些项目是使用 java8 及以前版本开发的 web-service,但又想 migrate 到 java11 怎么办呢? 经过踩了很多坑,终于找到了办法,就是加入java11已经移除...

一、ws和wss的区别 Websocket使用 ws 或 wss 的统一资源标志符,类似于 HTTP 或 HTTPS,其中 wss 表示在 TLS 之上的 Websocket ,相当于 HTTPS 了。如: ws://example.com/myWs wss://example.com/myWs 默认情况下...


ESP8266的GPIO有效翻转大约需要2.5us(0.4MHz),而ws2812的控制电平要求精度在百ns级别,所以直接控制GPIO比较难实现。 在网上搜索了一下各种可行的方案: Arduino配合ws2812库 non_os SDK,配合 Adafruit_...
ws supports thepermessage-deflate extensionwhich enables the client and server to negotiate a compression algorithm and its parameters, and then selectively apply it to the data payloads of each ...

是的,荣耀ws851是智能路由器 优点: 1.五个千兆实线网口和千兆无线来对于将来有用2.设置简便3.外观比较漂亮,但对于我这种习惯把路由器挂到墙上的真的是无爱 缺点.荣耀ws851是智能路由器 优点: 1.五个千兆实线网口...
Node.js实现WebSocket


一文看懂WS2812的呼吸灯实现
标签: 网络



1.查进程号 ps -A|grep sillyGirl 上面查出来的进程号 2.杀进程(把以前的傻妞进程关闭) kill -9 xxx 把上面查出来的进程号用上面x替换 3.查机器人进程 pm2 list 4.杀死之前所有的机器人进程 pm2 delete all 5.安装...
推荐文章
- http作业
- KVstore :键值映射存储服务器
- java-php-python-ssm社区志愿者服务管理系统计算机毕业设计_社区 志愿服务系统源码 php-程序员宅基地
- java/php/node.js/python病人跟踪治疗信息管理系统【2024年毕设】-程序员宅基地
- 空间数据引擎oracle_空间数据库引擎及其解决方案分析-程序员宅基地
- java发布rest服务器,使用Java restlet发布到服务器-程序员宅基地
- 使用flex-wrap实现弹性盒自动换行-程序员宅基地
- 改变Android Studio的背景background_as怎么设置背景-程序员宅基地
- 桩筏有限元中的弹性板计算_专栏 l 增材制造点阵结构在压力容器优化设计中的应用...-程序员宅基地
- Firefox安装广告屏蔽插件(uBlock Origin)_ublock origin插件-程序员宅基地